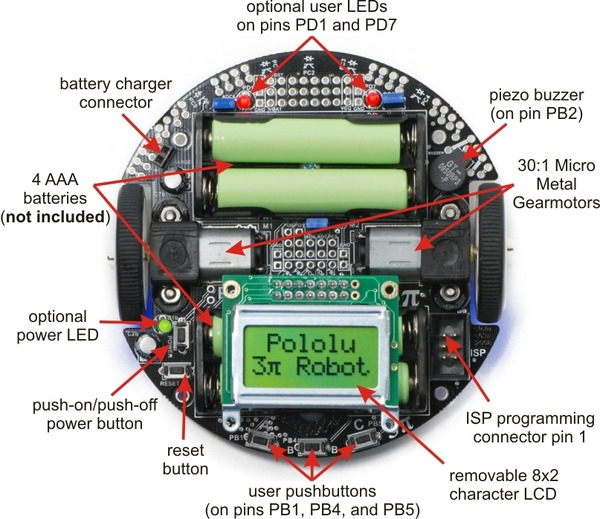
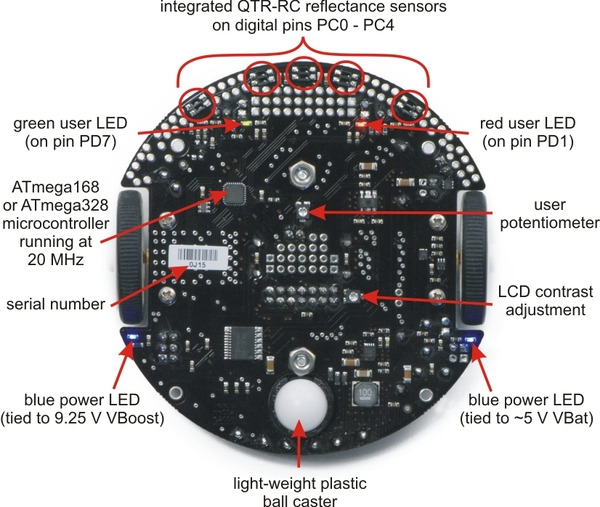
) Pololu 3pi Robot Pololu 3pi RobotP-975 The Pololu 3pi robot is a complete, high-performance mobile platform featuring two micro metal gearmotors, five reflectance sensors, an 8×2 character LCD, a buzzer, and three user pushbuttons, all connected to a C-programmable ATmega168 microcontroller. Capable of speeds exceeding 3 feet per second, 3pi is a great first robot for ambitious beginners and a perfect second robot for those looking to move up from non-programmable or slower beginner robots. The Pololu 3pi robot is a small (9.5 cm/3.7" diameter, 83 g/2.9 oz without batteries), high-performance, autonomous robot, designed to excel in line following and maze-solving competitions. Powered by four AAA batteries (not included) and a unique power system that runs the motors at a constant 9.25 V, 3pi is capable of speeds up to 100 cm/second while making precise turns and spins that don’t vary with the battery voltage. The 3pi is based on an Atmel ATmega168 microcontroller running at 20 MHz with 16KB of flash program memory and 1KB data memory. The use of the ATmega168 microcontroller makes the 3pi compatible with the popular Arduino development platform. Free C and C++ development tools are also available, and an extensive set of libraries make it a breeze to interface with all of the integrated hardware. Sample programs will be available to show how to use the various 3pi components, as well as how to perform more complex behaviors such as line following and maze solving. All this makes the 3pi a great platform for learning robotics! Note that an external AVR ISP programmer such as the Orangutan USB programmer is required to program the 3pi.
The following video shows a 3pi prototype autonomously solving a line maze. It first runs through the maze executing a search algorithm, keeping track of which way it is turning at intersections and discarding paths that lead to dead ends. Once it finds the end, which is marked by a solid black circle, it determines from memory the best path from start to finish and on subsequent runs aggressively drives that shortest path. This is just one example of what the 3pi is capable of.
|